Описание
В этом примере показано управление двумя сервоприводами SC90 с помощью Arduino. В качестве источника питания для сервоприводов используем питание от Arduino, но в готовых проектах рекомендую использовать отдельное питание на 5В.
Подключение
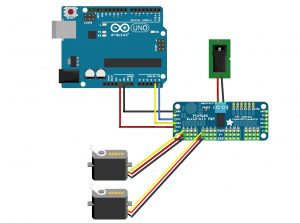
Сервопривод подключаются с помощью 3-проводного разъема BLS, в гнездо 0 и 4. Далее подключаем линию I2C, SDA к А4 (Arduino) и SCL к A5 (Arduino), затем подключаем питание логической части схемы GND и Vcc и в конце подключаем питание сервоприводов. Для удобства привел схему подключения ниже.
Установка библиотеки
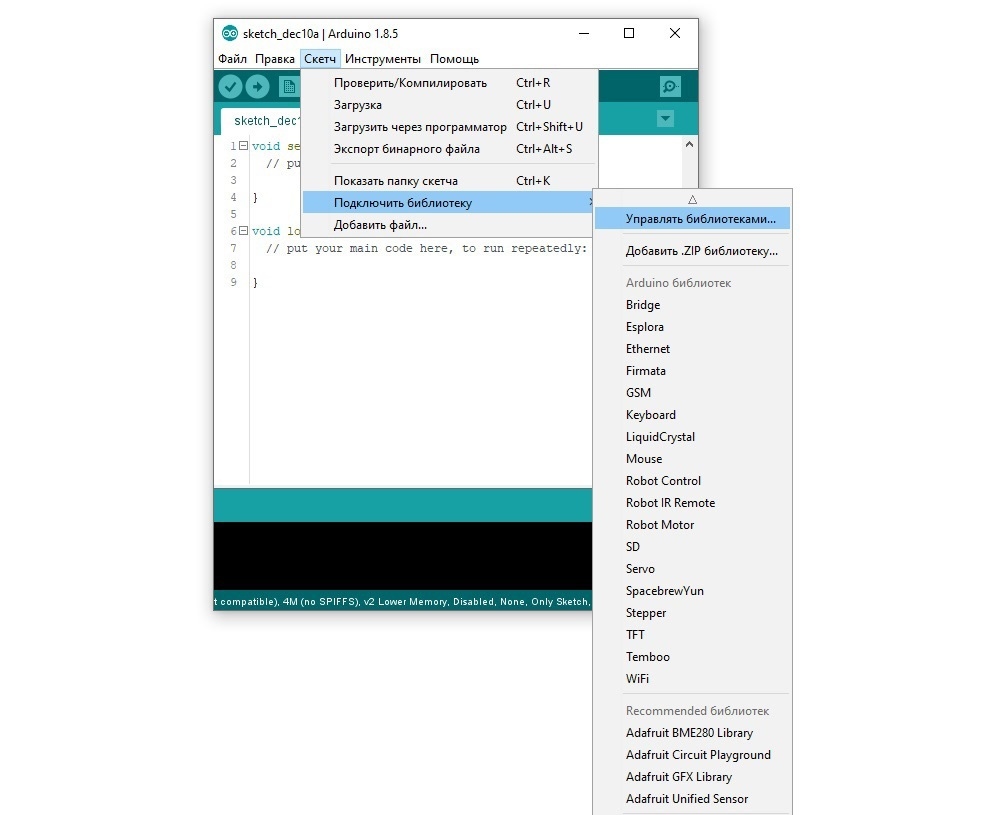
Для работы скетча необходимо библиотека «Wire» и «Adafruit_PWMServoDriver«, последняя библиотека не входит в среду разработки IDE Arduino необходимо дополнительно скачать с «Менеджера библиотек«.
Далее вводим в поиск «PWM» и устанавливаем указанную библиотеку.
Программа
Теперь можно приступить к скетчу, скачиваем или копируем его в среду разработки Arduino IDE.

 ПН-СБ 9:00 - 18:00
ПН-СБ 9:00 - 18:00